
Blog
Den Mittelspannungsengpass bei der KI-Expansion verstehen
Leistungsbedarf für CPUs und GPUs in moderne Rechenzentren haben in letzter Zeit dramatisch zugenommen, insbesondere bei den neuen intensiven KI-Anwendungen. Beispielsweise wird für die neuesten GPUs wie die Nvidia GB200 eine Geräteverlustleistung von über 2 kW bei 1000 A+ Spitzenstrom erwartet. Gleichzeitig schwankt der von den ICs aufgenommene Strom schnell zwischen Leerlauf und voller Leistung, wenn Prozesse hoch- und heruntergefahren werden.
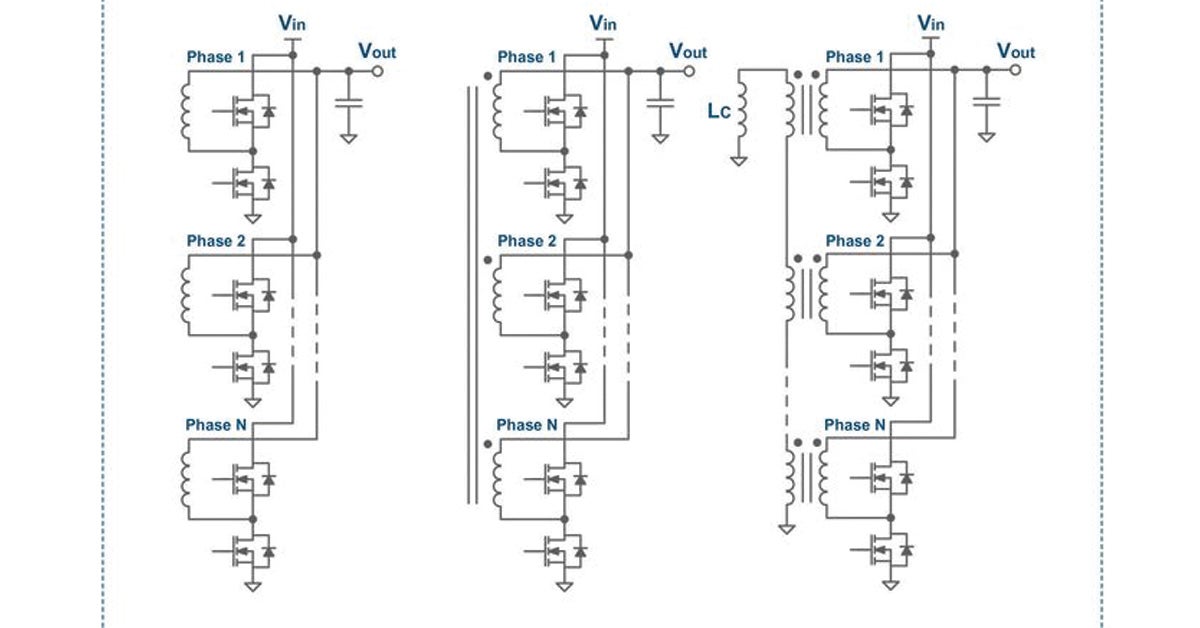
Zur Erzeugung der Stromversorgung für die ICs, die derzeit bei etwa 0,6 V liegt, werden Buck-Regler verwendet, die normalerweise mit 12 V versorgt werden. Auf den Leistungsstufen sind verschachtelte Mehrphasentechniken unverzichtbar. Sie teilen die Reglerverlustleistung auf mehrere Leistungsstufen auf, was den positiven Nebeneffekt hat, dass der Ausgangswelligkeitsstrom aufgehoben wird.
Dies wiederum reduziert die Ausgangswelligkeitsspannung bei gegebenen Kondensatorgrößen und verringert die Verlustleistung in den Kondensator-ESRs. Um weitere Effizienzsteigerungen zu erzielen, können die Induktoren im Mehrphasen-Buck als eine magnetische Struktur miteinander gekoppelt werden. Dadurch wird die Welligkeitsstromkompensation innerhalb der Induktoren, Schalter und Leiterplattenspuren effektiv aufgehoben, was zu einer geringeren Verlustleistung und potenziell kleineren Komponentengrößen führt.
Es gibt jedoch auch Kompromisse: Der Grad der Aufhebung hängt vom Arbeitszyklus ab. Außerdem hat der Welligkeitsstrom zwar einen niedrigeren Effektivwert, aber eine hohe Komponente bei einer Frequenz von N x F, wobei F die Phasenschaltfrequenz und N die Anzahl der Phasen ist. Dies kann die Kern- und möglicherweise Kondensatorverluste erhöhen. In der Praxis wird der Ansatz mit mehrphasig gekoppelten Induktoren häufig verwendet, um die Schaltfrequenz für einen akzeptablen Welligkeitsstrom zu reduzieren und so die dynamischen Verluste des Schalters zu verringern. Alternativ kann die Frequenz hoch gehalten werden, aber die Induktorwerte können für einen akzeptablen Welligkeitsstrom reduziert werden, was zu einer schnelleren Lastübergangsreaktion und einem höheren Induktorsättigungsstrom bei gleicher Kerngröße führt. Beispielsweise kann mit vier gekoppelten Phasen die magnetische Größe um etwa das Vierfache reduziert werden, und die Anstiegsrate des Induktorstroms bei Lastübergängen kann etwa sechsmal besser sein, bei entsprechend geringerer Spannungsauslenkung. Mit einer höheren Anzahl verschachtelter Phasen wird eine einzelne magnetische Struktur jedoch unpraktisch komplex. Daher wird die Kopplung manchmal in kleinere Phasengruppen aufgeteilt, was zu einem geringeren Gesamtvorteil führt.
Ein weiterer neuer Ansatz zur weiteren Verbesserung der transienten Lastleistung ist der Trans-Inductor Voltage Regulator (TLVR).
Im TLVR werden diskrete Induktoren verwendet, jeder typischerweise mit einer 1:1-Sekundärwicklung. Alle diese Wicklungen sind in Reihe geschaltet, wobei ihre Enden über einen Induktor Lc geerdet sind, der eine diskrete Komponente und die Summe aller Streuinduktivitäten der Transformatoren enthält. Die Transformatoren fungieren als Spannungswandler, sodass der Strom in der Sekundärwicklung durch die Last (den Kompensationsinduktor Lc) und den Arbeitszyklus bestimmt wird. Bei bestimmten Arbeitszyklen heben sich die reflektierten Spannungen auf, insbesondere wenn D=1/N für einen N-Phasen-Wandler ist. Wenn ein Lastübergang auftritt und der Ausgang zu sinken beginnt, erhöht die Rückkopplungssteuerung die Impulsdauer (Arbeitszyklus) der in diesem Moment leitenden Phase. Aufgrund der Transformatorwirkung erfährt die zugehörige Transformator-Sekundärwicklung einen längeren Spannungsimpuls T, wodurch der sekundäre Spitzenstrom gemäß I=ET/Lc erhöht wird.
Dieser Strom fließt jedoch durch alle Sekundärwicklungen des Transformators und spiegelt den gleichen Stromanstieg in jeder der Primärwicklungen wider. Die Primärwicklungen sind parallel geschaltet, sodass der dem Ausgang zugeführte Strom dem gekoppelten Wert multipliziert mit der Anzahl der Phasen entspricht, wodurch der erhöhte Strom aus der leitenden Phase effektiv durch N verstärkt wird. Dieser Effekt sorgt für eine erhöhte Stromversorgung in einer bestimmten Zeit, d. h. ein höheres di/dt, was zu einer schnelleren Reaktion auf vorübergehende Belastungen mit weniger Spannungsüber- und -unterschwingen führt.