
Produkt
BMR353: Leistungsstarker, hocheffizienter Achtel-Brick-IBC, optimiert für KI-Anforderungen
Moderne digitale Schaltungen benötigen Versorgungsspannungen, die innerhalb enger Spannungsgrenzen bleiben, mit Nennwerten – oft unter 1 V. Die Versorgungsspannungen werden typischerweise von höheren Systembusspannungen mittels geschalteter, nicht isolierter PoL-Wandler abgeleitet – die, wie der Name schon sagt, in der Nähe der Endlast platziert sind und eine konstante Spannung bei Änderungen des Laststroms, der Eingangsspannung und der Umgebungsbedingungen wie der Temperatur liefern.
Die Regelung erfolgt mittels eines Regelkreises, der das Ausgangssignal abtastet, mit einem Referenzsignal vergleicht und anschließend das Tastverhältnis des PoL anpasst, um etwaige Fehler zu korrigieren. Der Regelkreis kann traditionell analog ausgeführt sein, wobei die Fehlerkorrektur über eine lineare Rückkopplungsschaltung erfolgt. Alternativ kann er, wie zunehmend üblich, digital implementiert werden, wobei das PoL-Ausgangssignal einen AD-Wandler durchläuft und die gesamte Fehlerkorrektur in der Firmware durchgeführt wird. In beiden Fällen ist die Genauigkeit des Ausgangssignals bei konstanter Last lediglich durch die Qualität des Referenzsignals und die Gleichstromverstärkung des Regelkreises begrenzt. Diese kann 80 dB oder höher betragen, was beispielsweise bei einem Ausgangssignal von einem Volt zu einem statischen Fehler von weniger als einem Millivolt führt.
Alle Regelkreise, ob analog oder digital, reagieren mit einer gewissen Zeit auf Änderungen. Bei einem plötzlichen Anstieg des Laststroms sinkt beispielsweise die Ausgangsspannung des PoL, bis der Regelkreis die Änderung kompensiert und den korrekten Wert wiederherstellt. Amplitude und Dauer des Abfalls (bzw. Anstiegs bei sinkender Last) müssen sorgfältig kontrolliert werden, um die Spannungsgrenzen des Last-ICs nicht zu überschreiten. Bei Prozessoren können Stromsprünge von Leerlauf- in Aktivzustand mehrere zehn Ampere betragen, begleitet von sehr kurzen Anstiegs- und Abfallzeiten, was das Problem verschärft. Die Änderung der PoL-Ausgangsspannung bei Lastsprüngen wird durch Widerstandselemente im Stromnetz, wie Leiterbahnen und Leitungen, sowie durch die PoL-Ausgangsinduktivität verursacht. Diese wirkt der Stromänderung entgegen, indem sie gemäß der bekannten Formel E = -L * di/dt eine Spannung erzeugt. Auch die Induktivität der Leiterbahn vom PoL zum Last-IC trägt zu diesem Effekt bei. Kondensatoren am PoL-Ausgang sind notwendig, um während der Schaltpause Energie zu speichern und Spannungsspitzen bei Lastsprüngen zu reduzieren.
Ein Resonanzkreis entsteht durch die Kombination von Reiheninduktivität und Parallelkapazität. Seine Verstärkung erreicht bei der Resonanzfrequenz ein Maximum, begleitet von einer schnellen Phasenverschiebung von -180°. Aufgrund der systembedingten Phasenverschiebung von 180° in einem negativen Rückkopplungssystem kann die Verzögerung im Regelkreis bei bestimmten Frequenzen insgesamt 360° betragen, was zu positiver Rückkopplung und Instabilität führt.
“Die Kompensation des Rückkopplungssignals ist daher notwendig, indem der Frequenzgang des Fehlerverstärkers so angepasst wird, dass die Bandbreite für ein optimales Lastsprungverhalten hoch bleibt und gleichzeitig die Stabilität der Regelschleife gewährleistet ist. Dies äußert sich in einer Verstärkungsreserve von typischerweise mindestens -6 dB, wenn die Phasenverzögerung des Antriebsstrangs -180° erreicht, und einer Phasenreserve, die typischerweise mindestens 60° unter den vollen 360° liegt, bei der Frequenz, bei der die Verstärkung auf Eins abfällt. Idealerweise sollte die Verstärkung am Punkt der Verstärkung Eins um -20 dB/Dekade abnehmen.
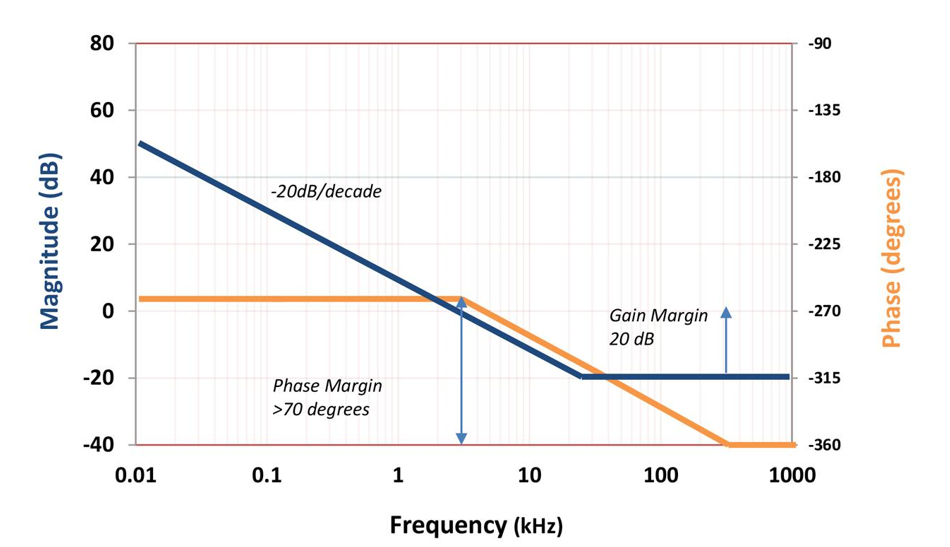
Abbildung 1: Typisches Sollwertverhalten des Regelkreises
Bei analogen Kompensationsverfahren werden um den Fehlerverstärker herum parallele und serielle Widerstands-Kondensator-Netzwerke (RC-Netzwerke) eingesetzt, um den Frequenzgang der Rückkopplung zu formen. Diese Netzwerke weisen “Eckfrequenzen” auf, die “Pole” oder “Nullstellen” in der Übertragungsfunktion der Schleife darstellen. Diese können grafisch in einem Bode-Diagramm visualisiert werden, um die Bandbreite der Schleife sowie die erreichte Verstärkungs- und Phasenreserve darzustellen. Bei digitalen Regelungsverfahren werden die Rückkopplungsspannung und das Fehlersignal mithilfe der Logik- und Arithmetikfunktionen eines Prozessors verarbeitet, um denselben Effekt zu erzielen. Daher ist es sinnvoll, die mathematische Darstellung des gewünschten Kompensationsfrequenzgangs zu betrachten. In diesem Fall kann die traditionelle Regelungstechnik mit einem PID-Regler (Proportional-Integral-Differential) angewendet werden; es werden drei separate Fehlerkorrektursignale erzeugt. proportional zur momentanen Differenz zwischen Referenzwert und gewünschtem Ausgabewert, wobei eins die Zeit darstellt Integral der Differenz oder Summe der Differenzen über die vergangene Zeit und eine, die die Differential oder die Änderungsrate des Fehlersignals als Indikator für dessen zukünftigen Verlauf. Unterschiedliche Gewichtungen KP, Kich und KD Die drei PID-Terme können dann addiert werden, um eine optimale Regelkreisantwort zu erreichen. Die Gesamtregelungsfunktion u(t) für Fehlerspannung t ist dann:
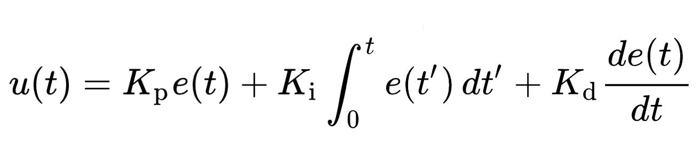
Die digitale Steuerung ermöglicht auch andere Kompensationsverfahren, sogar nichtlineare, und die Gewichtungen können dynamisch an sich ändernde Lastbedingungen angepasst werden.
Digitale POLs verfügen üblicherweise über eine Standardkonfiguration mit einer robusten Regelkreiskompensation (PID-Regelung), die einen breiten Betriebsbereich für Eingangs- und Ausgangsspannungen sowie kapazitive Lasten ermöglicht. Für Anwendungen mit spezifischen Eingangs- und Ausgangsspannungen sowie kapazitiven Lasten kann der Regelkreis für einen robusten und stabilen Betrieb mit verbessertem Lastsprungverhalten optimiert werden.
Diese Optimierung minimiert die Anzahl der benötigten Entkopplungskondensatoren am Ausgang für eine gegebene Laständerungsanforderung und führt so zu optimierten Kosten und minimalem Platzbedarf auf der Leiterplatte. Glücklicherweise bieten einige Hersteller Software für diesen Zweck an. Ein Beispiel ist die … Flex Power Designer-Software, kostenlos erhältlich bei Flex-Leistungsmodule.
Ausgangspunkt für die Schleifenkompensation ist die Lastanforderung. Ein typisches Beispiel für einen IC mit einer 1-V-Schiene ist in Tabelle 1 dargestellt.
| Lasttransientenanforderung | Im Beispiel verwendeter Wert |
|---|---|
| Maximale Abweichung | 30 mV (3% mit 1 V Ausgang) |
| Erholungszeit | 100 µs |
| Wiederherstellungsgrenze | 10 mV (1% mit 1 V Ausgang) |
Die tatsächlichen Lastschritte und Anstiegsgeschwindigkeiten hängen von der Anwendung ab, daher müssen zunächst Annahmen getroffen werden, bis reale Tests durchgeführt werden. In unserem Beispiel werden die Werte aus Tabelle 2 angenommen.
| Parameter der Simulation des transienten Verhaltens | Im Beispiel verwendeter Wert |
|---|---|
| Laststromübergang | 10 A – 20 A |
| Anstiegsgeschwindigkeit | 5 A/µs |
| Schrittperiode | 2 ms |
| Vout hängt | 0 mV/A |
Sobald ein PoL-Typ aus dem Flex-Bereich ausgewählt ist, BMR464 In diesem Beispiel werden die Komponenten eines Ausgangsfilters zwischen dem PoL und der Last spezifiziert. Dazu gehören empfohlene Ausgangskondensatoren zur Energiespeicherung, Kondensatoren zur Rauschunterdrückung sowie jegliche beabsichtigte oder parasitäre Serieninduktivität. Ein typisches Netzwerk ist in Abbildung 1 dargestellt. Abbildung 2.
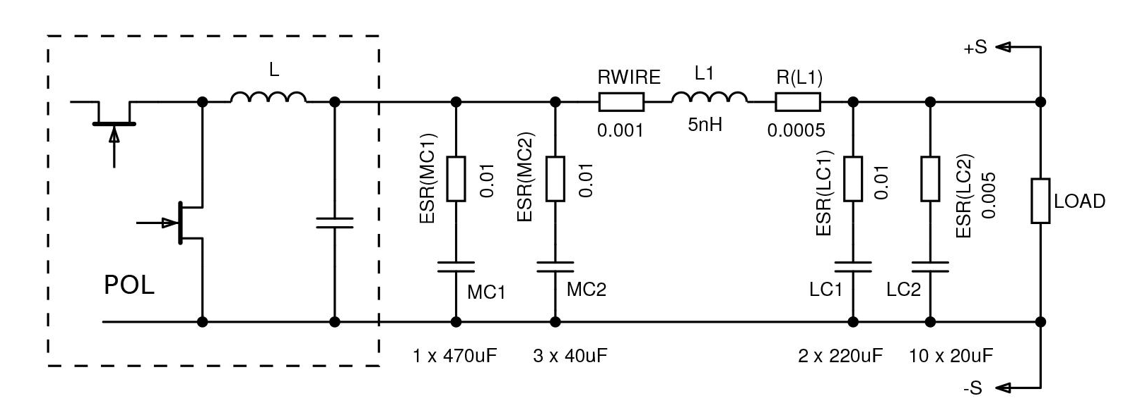
Abbildung 2: Typisches PoL-Ausgangsfilternetzwerk
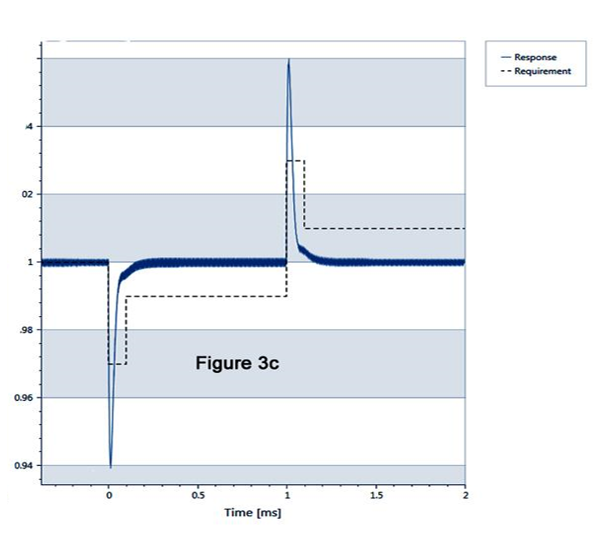
Die Software kann verschiedene Grade der Rückkopplungskompensation für das Lastnetz anwenden und das Einschwingverhalten mit “robusten” und “optimierten” Stufen anstreben. Die Standard-Simulation kann grafisch dargestellt werden und zeigt typischerweise ein stark gedämpftes und stabiles, aber langsames Verhalten mit Spannungsabweichungen oberhalb der Zielwerte, dargestellt als gestrichelte Linien. Abbildung 3a. Die “robuste” Simulation wählt voreingestellte PID-Gewichtungen, um die Reaktionszeit auf die Zielwerte zu verbessern, erreicht aber dennoch nicht die Anforderungen an die Spannungsabweichung (Abbildung 3bDie Auswahl einer “optimierten” Simulation mit iterativer Berechnung der PID-Gewichtung verbessert die Spannungsabweichung und die Ansprechzeit noch weiter (Abbildung 3cDies bietet zwar einen guten Sicherheitsspielraum hinsichtlich der Zielspannungsabweichung und der Ansprechzeit, die Leistung reagiert jedoch sehr empfindlich auf Bauteiltoleranzen und Fehler bei den angenommenen parasitären Werten und kann unter bestimmten Bedingungen instabil sein.
Abbildung 3a: Robustes Lastübergangsverhalten
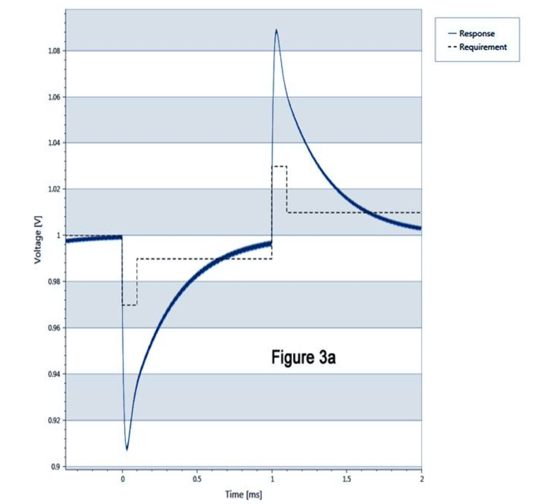
Abbildung 3b: Standardmäßiges Lastübergangsverhalten
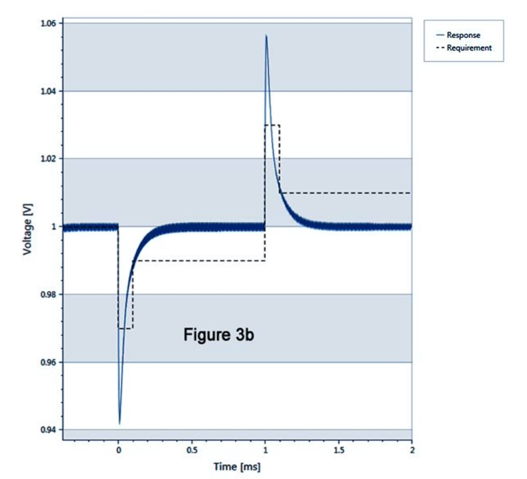
Abbildung 3c: Standardmäßiges Lastübergangsverhalten
Um die Zielvorgabe für die Spannungsabweichung besser einzuhalten, verfügen viele der PoLs (Power-Line-Module) des Flex-Leistungsmoduls, wie beispielsweise die Modelle BMR462/463/464/466, über eine nichtlineare Regelungsfunktion (NLR). In diesem Verfahren wird neben der normalen PID-Regelung die Rückkopplungsspannung zyklusweise überwacht. Fällt sie außerhalb vordefinierter Grenzwerte, wird der Leistungsstrang so eingestellt, dass er sofort Strom liefert oder aufnimmt, wobei zusätzliche Impulse erzeugt bzw. unterdrückt werden. Dies trägt zur Korrektur der Ausgangsabweichung bei und erhöht effektiv die Bandbreite des Regelkreises.
Mit optimierter PID- und NLR-Regelung ergibt sich ein Echtzeitdiagramm der Spannungsabweichung unter den definierten Bedingungen. Abbildung 4, Die Erholungszeit lag deutlich innerhalb des Zielwerts von 100 µs, wobei die Spitzenabweichung nur geringfügig über unserem Zielwert von +/-30 mV bei 65 mV Spitze-Spitze lag.
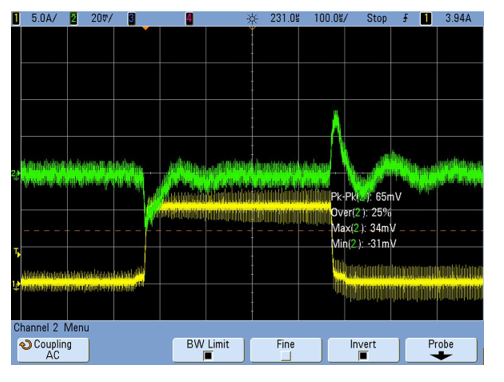
Abbildung 4: Gemessene Reaktion des beispielhaften PoL- und Lastsystems
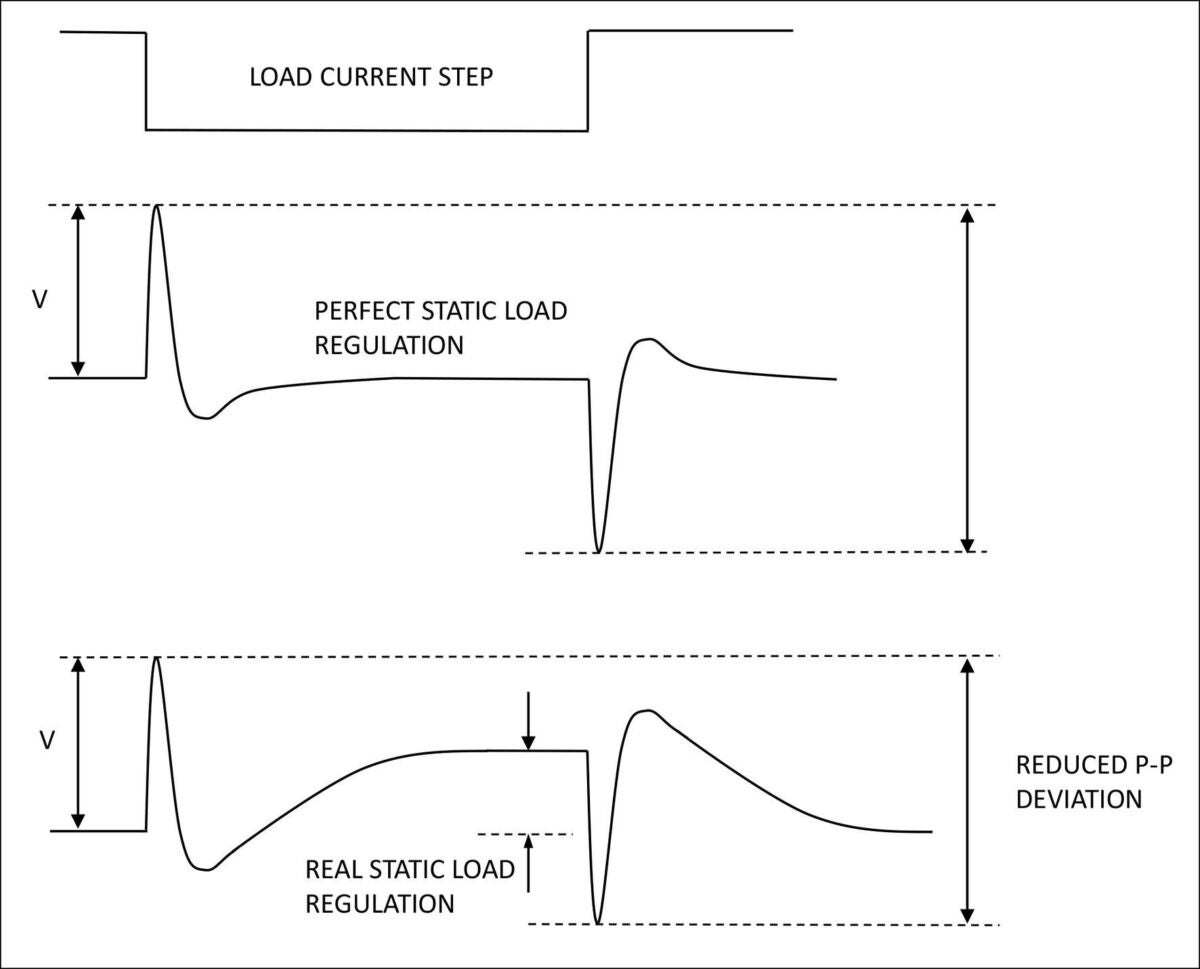
Abbildung 5: Die Zulassung einer endlichen statischen Lastregelung verbessert die dynamische Spannungsabweichung
In Abbildung 4 ist zu sehen, dass sich die Ausgangsspannung nach jeder Lastsprungflanke auf wenige Millivolt um den Nennwert einpendelt.
Die Software Flex Power Designer ermöglicht die Anpassung dieser statischen Regelung, sodass bei steigender Last ein gewisser Spannungsabfall (“Drop”) auftritt. Dies kann die dynamische Gesamtregelung verbessern, wie in Abbildung 1 gezeigt wird. Abbildung 5, um möglicherweise die Zielvorgabe für die Spannungsabweichung zu erfüllen.
Die digitale Steuerung von PoL-Reglern eröffnet vielfältige Möglichkeiten zur Optimierung des statischen und dynamischen Lastübergangsverhaltens für die anspruchsvollen Anwendungen von heute. Software wie beispielsweise Flex Power Designer Dank der benutzerfreundlichen grafischen Oberfläche wird der Optimierungsprozess schnell und einfach.