
产品
BMR353:专为满足人工智能需求而优化的高功率、高效率八分之一砖IBC
现代数字电路需要电压保持在严格限制范围内的电源轨,其标称值通常低于 1V。这些电源轨通常由较高的系统总线电压通过开关模式的非隔离式 PoL 转换器产生——顾名思义,这些转换器靠近负载末端,可在负载电流、输入电压和环境条件(如温度)变化时提供恒定电压。.
稳压是通过控制环路实现的,该控制环路对输出进行采样,将其与参考信号进行比较,然后调整 PoL 的开关占空比以校正任何误差。控制环路可以是传统的“模拟”类型,其中误差校正采用线性反馈电路;或者,正如越来越多地采用的那样,可以采用数字方式实现,其中 PoL 输出经过模数转换器 (AD 转换器),所有误差校正都在固件中完成。无论采用哪种方式,在恒定负载下,输出精度仅受参考信号的质量和控制环路的直流增益的限制,直流增益可以达到 80 dB 或更高,例如,在 1 伏输出中,静态误差小于 1 毫伏。.
所有控制回路,无论是模拟的还是数字的,对变化都有响应时间。例如,当负载电流阶跃上升时,PoL 输出电压会下降,直到控制回路“追上”并将输出电压恢复到正确值。必须仔细控制电压下降(或负载减小时电压上升)的幅度和持续时间,以避免超过负载 IC 的电压限制。例如,对于处理器而言,从空闲状态到工作状态的电流阶跃可能高达数十安培,且上升和下降时间非常快,这会加剧问题。负载阶跃引起的 PoL 输出电压变化是由电源系统中的电阻元件(例如线路和导线)以及 PoL 输出电感引起的。PoL 输出电感会根据公式 E=-L*di/dt 产生电压,从而阻碍电流变化。从 PoL 到负载 IC 的跟踪线路中的电感也会加剧这种影响。PoL 输出端的电容器对于在开关周期的关断期间提供能量存储至关重要,并有助于减少负载阶跃引起的电压瞬变。.
然而,串联电感和并联电容组合会形成谐振电路,其增益在谐振频率处达到峰值,并伴有快速的相位变化,导致-180°的延迟。由于负反馈系统固有的180°相移,控制回路的延迟在某些频率下可累计达到360°,从而产生正反馈和不稳定性。.
“因此,需要通过调整误差放大器的频率响应来”补偿“反馈信号,以保持高带宽,从而获得最佳的负载瞬态响应,同时维持环路稳定性。这体现在”增益裕度“(通常至少为-6 dB,当功率级相位延迟达到-180°时)和”相位裕度”(通常至少比增益降至1的频率处的360°相位差小60°)。理想情况下,在增益为1的频率点,增益应以每十倍频程-20 dB的速度下降。.
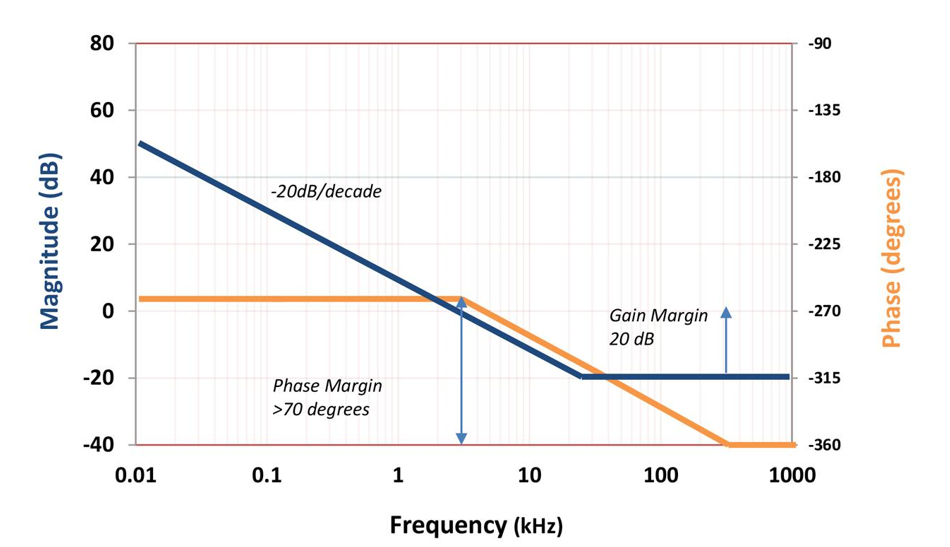
图 1:典型的目标控制回路响应
在模拟补偿方案中,误差放大器周围采用并联和串联的电阻-电容网络来调整反馈频率响应。这些网络具有“转角频率”,代表环路传递函数中的“极点”或“零点”,这些频率可以通过“伯德图”图形化地叠加,从而直观地显示环路带宽和增益/相位裕度。在数字控制方案中,反馈电压和误差信号通过处理器的逻辑和算术运算进行处理以达到相同的效果,因此用所需补偿频率响应的数学表达式来描述更为有效。在这种情况下,可以使用传统的控制理论,例如比例-积分-微分 (PID) 控制方案;该方案会生成三个独立的误差校正信号,分别对应一个、两个、三个不同的误差校正信号。 比例 参考输出与期望输出之间的瞬时差值,代表时间 不可缺少的 过去一段时间的差值或差值总和,以及代表 微分 或者误差信号的变化率,以此来指示其未来的变化轨迹。不同的权重 钾页, 钾我 和 钾d 然后可以将三个PID项相加,以接近最优回路响应。总控制功能 u(t) 误差电压 埃 然后是:
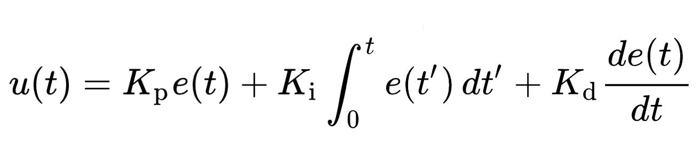
数字控制还允许其他响应补偿方案,甚至是非线性的,并且可以根据不断变化的负载条件动态地改变权重。.
数字式功率放大器通常采用标准配置,并具有稳健的控制回路补偿设置(PID 设置),使其能够在宽广的输入输出电压范围和容性负载下工作。对于具有特定输入电压、输出电压和容性负载的应用,可以优化控制回路,以实现稳健稳定的运行并改善负载瞬态响应。.
更多信息请参阅 Flex 功率模块应用笔记 306:优化 PID 和 NLR 控制的负载瞬态响应
这种优化将最大限度地减少给定负载瞬态要求下所需的输出去耦电容的数量,从而优化成本并最大限度地减少电路板空间。幸运的是,一些供应商提供了用于此目的的软件。例如: 伟创力 Power Designer 软件,, 可免费获取 伟创力电源模块.
更多信息请参阅技术论文 022:《使用“回路补偿器”进行回路补偿和解耦设计》。”
环路补偿的出发点是负载需求。表 1 给出了一个典型示例,该示例针对的是具有 1V 电源轨的集成电路。.
| 负载瞬态要求 | 示例中使用的值 |
|---|---|
| 最大偏差 | 30 mV(3% 的 1 V 输出) |
| 恢复时间 | 100 微秒 |
| 恢复限 | 10 mV(1% 的 1 V 输出) |
实际遇到的负载阶跃和转换速率取决于具体应用,因此在进行实际测试之前,必须先做出一些假设。在本例中,我们假设采用表 2 中的数值。.
| 瞬态响应仿真参数 | 示例中使用的值 |
|---|---|
| 负载电流转换 | 10 安培 – 20 安培 |
| 转换速率 | 5 A/µs |
| 步骤期 | 2毫秒 |
| 输出电压下垂 | 0 mV/A |
从 Flex 范围内选择 PoL 类型后,, BMR464 本例中,指定了 PoL 和负载之间输出滤波器的组成部分。这些组成部分包括推荐的储能输出电容、噪声滤波电容以及任何有意或寄生串联电感。典型的网络结构如图所示。 图 2.
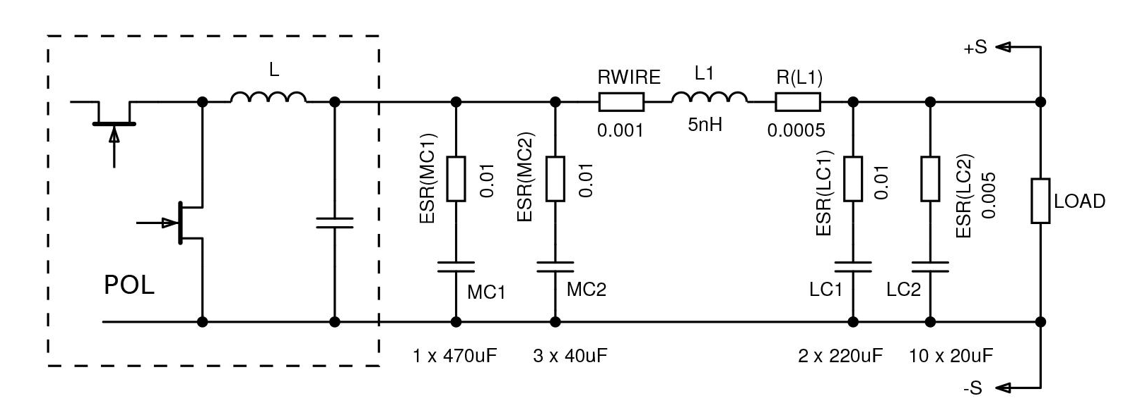
图 2:典型的 PoL 输出滤波器网络
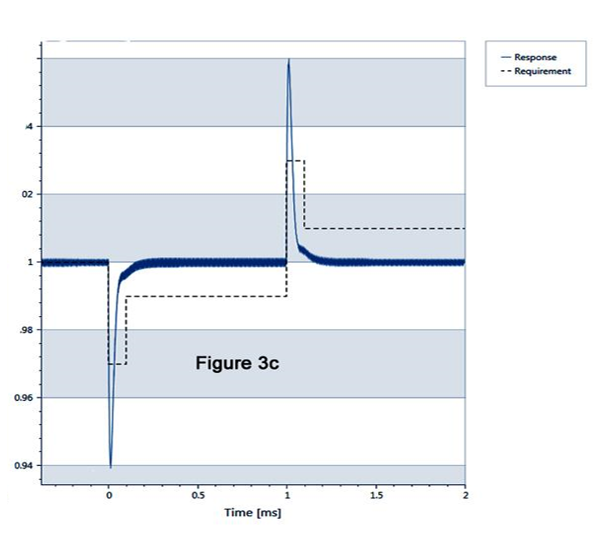
该软件可以对负载网络和目标瞬态响应应用不同程度的反馈补偿,并提供“稳健”和“优化”两种级别。默认仿真结果可以绘制成图表,通常显示响应具有很强的阻尼且稳定,但响应速度较慢,电压偏差高于目标值(图中以虚线表示)。 图 3a. “稳健”仿真选择预设的PID权重来改善对目标值的响应时间,但仍然无法达到电压偏差要求(图 3b选择“优化”仿真并迭代计算PID权重,可以进一步改善电压偏差和响应时间(图 3c虽然这为目标电压偏差和响应时间提供了良好的裕度,但性能将对元件容差和假定寄生值的误差非常敏感,并且在某些情况下可能不稳定。.
图 3a:稳健的负载瞬态响应
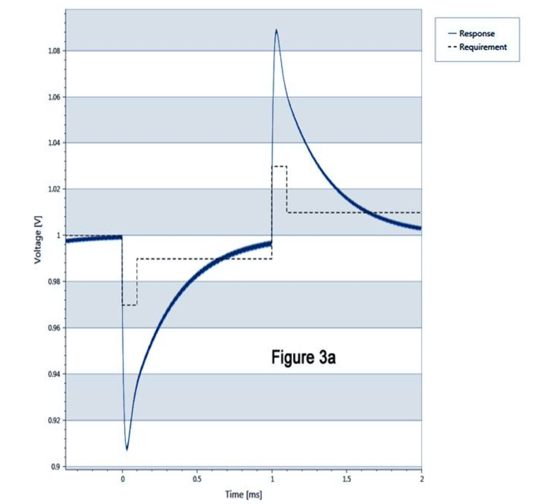
图 3b:默认负载瞬态响应
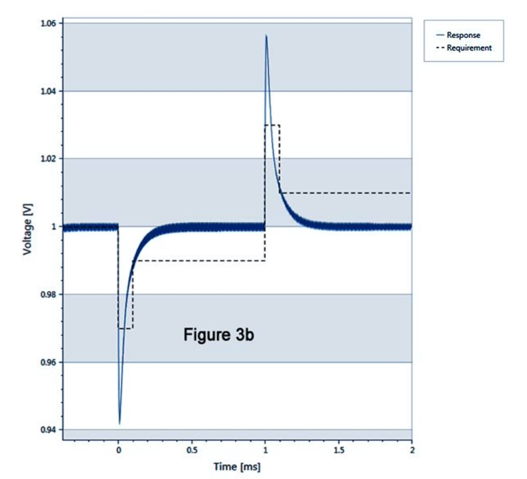
图 3c:默认负载瞬态响应
为了更接近目标电压偏差规格,许多 Flex 功率模块(例如 BMR462/463/464/466)的功率因数 (PoL) 都包含非线性响应 (NLR) 功能。在该方案中,除了常规的 PID 控制外,还会逐周期监测反馈电压。如果反馈电压超出预设限值,功率系统会立即通过额外的脉冲或消隐脉冲来分别提供或吸收电流。这有助于校正输出偏差,从而有效提高反馈回路带宽。.
通过优化PID和NLR控制,可以得到满足设定条件的电压偏差实时曲线。 图 4, 结果显示,恢复时间在目标 100 µs 内,峰值偏差略大于我们的 +/-30 mV 目标,峰峰值为 65 mV。.
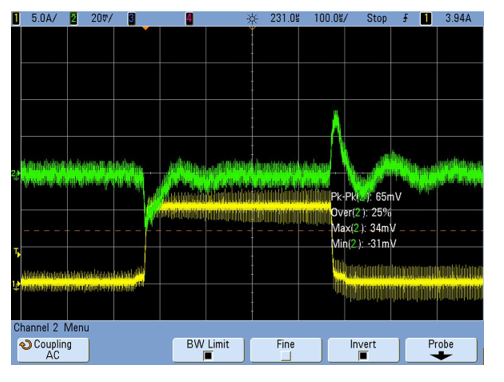
图 4:示例 PoL 和负载系统的测量响应
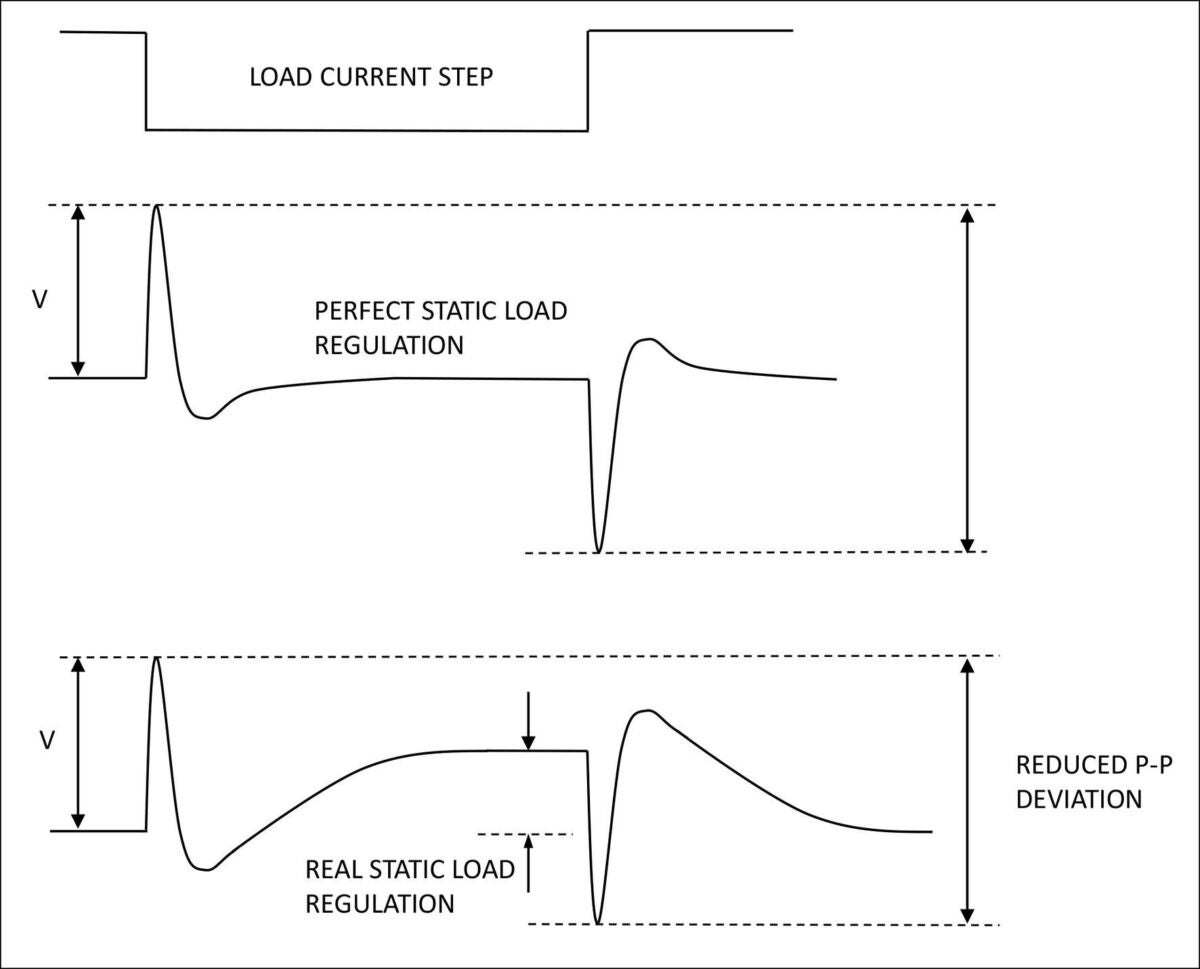
图 5:允许有限的静态负载调整可改善动态电压偏差
如图 4 所示,每次负载阶跃后,输出电压都会稳定在标称值的几毫伏以内。.
Flex 电源设计软件允许调整这种静态调节,使其在负载增加时出现一定的“下垂”。这实际上可以改善整体动态调节,如图所示。 图 5,, 有可能达到目标电压偏差规格。.
对 PoL 调节器进行数字化控制,为优化静态和动态负载瞬态响应以满足当今严苛的应用需求开辟了无限可能。诸如以下软件: 伟创力电源设计器 其用户友好的图形用户界面使优化过程变得快速简便。.