
Producto
BMR353: Contenedor IBC de un octavo de ladrillo de alta potencia y alta eficiencia optimizado para las exigencias de la IA.
Los circuitos digitales modernos necesitan líneas de alimentación que se mantengan dentro de límites de voltaje estrictos, con valores nominales, a menudo inferiores a 1 V. Estas líneas suelen derivarse de voltajes de bus del sistema más altos mediante convertidores PoL no aislados de modo conmutado, que, como su nombre indica, se ubican cerca de la carga final y proporcionan un voltaje constante ante cambios en la corriente de carga, el voltaje de entrada y las condiciones ambientales, como la temperatura.
La regulación se logra mediante un bucle de control que muestrea la salida, la compara con una referencia y ajusta el ciclo de trabajo de conmutación del PoL para corregir cualquier error. El bucle de control puede ser de tipo analógico tradicional, donde la corrección de errores se realiza con un circuito de retroalimentación lineal, o, como ocurre cada vez más, puede implementarse digitalmente, donde la salida del PoL se procesa mediante un convertidor AD y toda la corrección de errores se realiza en el firmware. En ambos casos, con una carga constante, la precisión de la salida solo está limitada por la calidad de la referencia y la ganancia de CC del bucle de control, que puede ser de 80 dB o superior, lo que proporciona un error estático inferior a un milivoltio en una salida de un voltio, por ejemplo.
Todos los bucles de control, analógicos o digitales, tienen un tiempo de respuesta a los cambios, de modo que, por ejemplo, ante un aumento repentino de la corriente de carga, la salida del PoL disminuirá hasta que el bucle de control se recupere y restablezca la salida al valor correcto. La amplitud y la duración de la caída (o el aumento en el caso de una disminución de la carga) deben controlarse cuidadosamente para no superar los límites de tensión del circuito integrado de carga. En el caso de los procesadores, por ejemplo, los incrementos de corriente pueden ser de decenas de amperios entre los estados de reposo y activo, con tiempos de subida y bajada muy rápidos, lo que agrava el problema. La variación de la tensión de salida del PoL ante los incrementos de carga se debe a los elementos resistivos del tren de potencia, como las pistas y los cables, y también al inductor de salida del PoL, que se opone al cambio de corriente generando tensión según la conocida fórmula E=-L*di/dt. La inductancia en el circuito de seguimiento desde el PoL hasta el circuito integrado de carga también contribuye a este efecto. Los condensadores en la salida del PoL son necesarios para almacenar energía durante el período de apagado del ciclo de conmutación y ayudan a reducir los transitorios de tensión ante los incrementos de carga.
Sin embargo, un circuito resonante se forma mediante la combinación de inductancia en serie y capacitancia en paralelo, con una ganancia que alcanza su máximo en la frecuencia de resonancia con un rápido cambio de fase de -180°. Debido al desfase inherente de 180° de un sistema de retroalimentación negativa, el retardo del bucle de control puede llegar a 360° a cierta frecuencia, lo que produce retroalimentación positiva e inestabilidad.
“Por lo tanto, es necesaria la compensación de la señal de retroalimentación mediante el ajuste de la respuesta en frecuencia del amplificador de error para mantener un ancho de banda elevado y así obtener la mejor respuesta a transitorios de carga, manteniendo al mismo tiempo la estabilidad del bucle. Esto se caracteriza por un margen de ganancia, típicamente de al menos -6 dB, cuando el retardo de fase del tren de potencia alcanza los -180°, y un margen de fase, típicamente de al menos 60° menos que los 360° completos, en la frecuencia donde la ganancia cae a la unidad. Idealmente, la ganancia debería reducirse en -20 dB/década en el punto de ganancia unitaria.
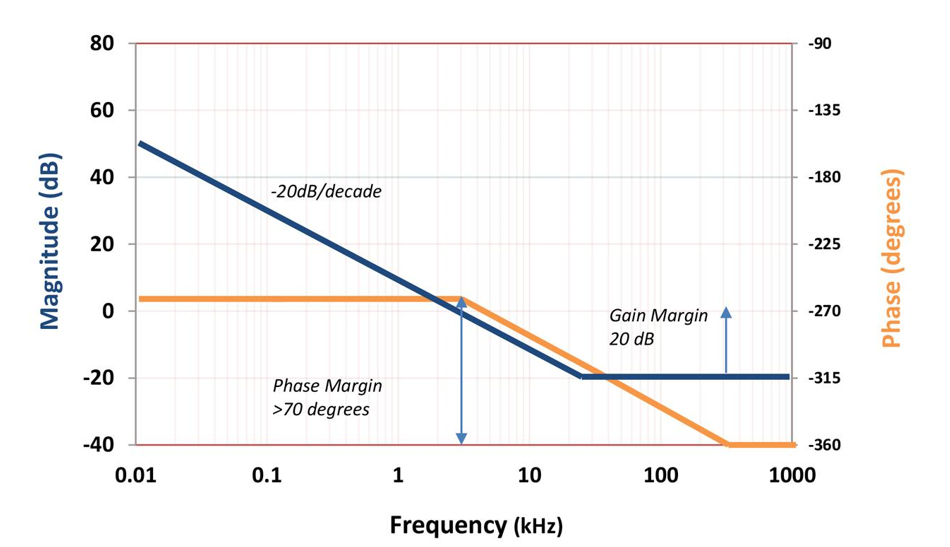
Figura 1: Respuesta típica del bucle de control del objetivo
En los esquemas de compensación analógica, se emplean redes de resistencias y condensadores en paralelo y en serie alrededor del amplificador de error para dar forma a la respuesta en frecuencia de la retroalimentación. Estas redes tienen "frecuencias de esquina", que representan "polos" o "ceros" en la función de transferencia del bucle, que se pueden agregar gráficamente en un "diagrama de Bode" para dar una indicación visual del ancho de banda del bucle y el margen de ganancia/fase alcanzado. En los esquemas de control digital, la tensión de retroalimentación y la señal de error se manipulan utilizando las funciones lógicas y aritméticas de un procesador para lograr el mismo efecto, por lo que es útil hablar en términos de la representación matemática de la respuesta en frecuencia de compensación deseada. En este caso, se puede utilizar la teoría de control tradicional con un esquema proporcional-integral-derivativo (PID); se generan tres señales de corrección de error separadas, una proporcional a la diferencia instantánea entre la referencia y la salida deseada, una que representa el tiempo integral de la diferencia o suma de diferencias a lo largo del tiempo pasado, y una que representa la diferencial o la tasa de cambio de la señal de error como indicación de su trayectoria futura. Diferentes ponderaciones kpag, ki y en kd Luego se pueden sumar los tres términos PID para aproximarse a una respuesta de lazo óptima. La función de control general Utah) para voltaje de error mi es entonces:
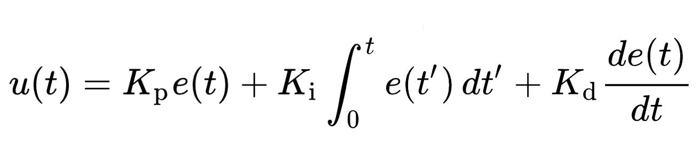
El control digital también permite otros esquemas de compensación de respuesta, incluso no lineales, y las ponderaciones se pueden modificar dinámicamente en respuesta a las condiciones de carga cambiantes.
Los reguladores de voltaje digitales (POL) suelen tener una configuración estándar con un ajuste de compensación de bucle de control robusto (ajuste PID) que permite un amplio rango de operación con voltajes de entrada y salida, así como con cargas capacitivas. Para una aplicación con un voltaje de entrada, un voltaje de salida y una carga capacitiva específicos, el bucle de control se puede optimizar para lograr un funcionamiento robusto y estable, con una respuesta mejorada a los transitorios de carga.
Esta optimización minimizará la cantidad de condensadores de desacoplamiento de salida necesarios para un requisito transitorio de carga dado, lo que resulta en un costo optimizado y un espacio de placa minimizado. Afortunadamente, algunos proveedores ofrecen software para este propósito. Un ejemplo es el Software de diseño de energía Flex, disponible gratuitamente desde Módulos de potencia Flex.
El punto de partida para la compensación de bucle es el requisito de carga. En la Tabla 1 se muestra un ejemplo típico para un circuito integrado con una tensión de alimentación de 1 V.
| requisito de transitorios de carga | Valor utilizado en el ejemplo |
|---|---|
| Desviación máxima | 30 mV (3% de salida de 1 V) |
| Tiempo de recuperación | 100 µs |
| Límite de recuperación | 10 mV (1% de salida de 1 V) |
Los pasos de carga reales y la velocidad de variación que se presentan dependen de la aplicación, por lo que es necesario realizar suposiciones iniciales hasta que se realicen pruebas en condiciones reales. En nuestro ejemplo, se asumen los valores de la Tabla 2.
| Parámetros de simulación de respuesta transitoria | Valor utilizado en el ejemplo |
|---|---|
| Transición de corriente de carga | 10 A – 20 A |
| Velocidad de cambio | 5 A/µs |
| Período de paso | 2 ms |
| Vout cae | 0 mV/A |
Una vez seleccionado un tipo PoL del rango Flex, BMR464 En este ejemplo, se especifican los componentes de un filtro de salida entre el PoL y la carga. Estos incluyen los condensadores de salida recomendados para el almacenamiento de energía, los condensadores para el filtrado de ruido y cualquier inductancia en serie intencional o parásita. Una red típica se muestra en la figura. Figura 2.
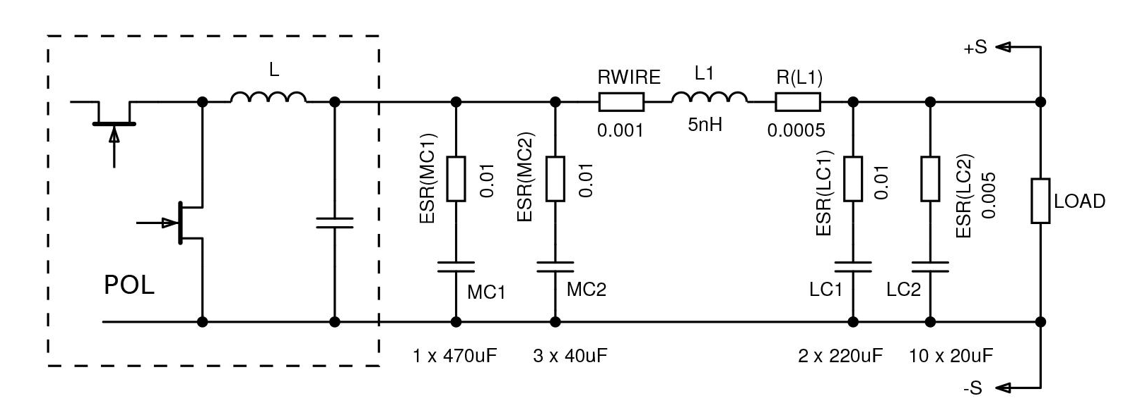
Figura 2: Red típica de filtro de salida PoL
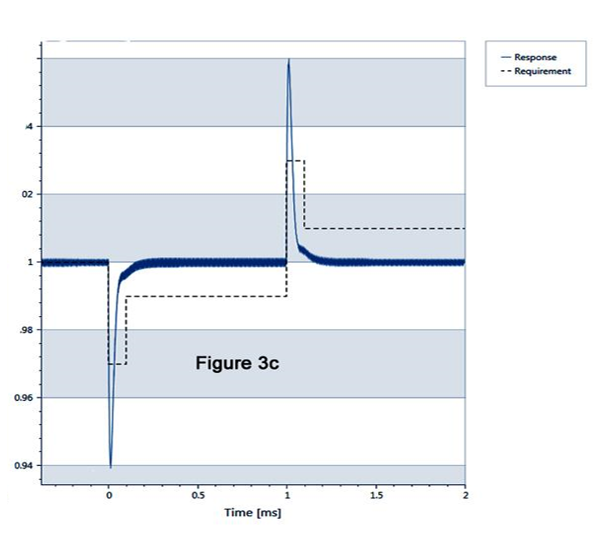
El software puede aplicar diferentes grados de compensación de retroalimentación para la red de carga y la respuesta transitoria objetivo con niveles “robustos” y “optimizados” disponibles. La simulación predeterminada se puede trazar en un gráfico y normalmente muestra una respuesta muy amortiguada y estable pero lenta con desviación de voltaje por encima de los valores objetivo, mostrados como líneas punteadas en Figura 3a. La simulación “robusta” elige ponderaciones PID preestablecidas para mejorar el tiempo de respuesta a los valores objetivo, pero aún así no cumple con los requisitos de desviación de voltaje (Figura 3b). Seleccionar la simulación “optimizada” con un cálculo iterativo de ponderaciones PID mejora aún más la desviación de voltaje y el tiempo de respuesta (Figura 3cSi bien esto proporciona un buen margen con respecto a la desviación de voltaje objetivo y el tiempo de respuesta, el rendimiento será muy sensible a las tolerancias de los componentes y a los errores en los valores parásitos supuestos, y podría ser inestable en algunas condiciones.
Figura 3a: Respuesta robusta a transitorios de carga
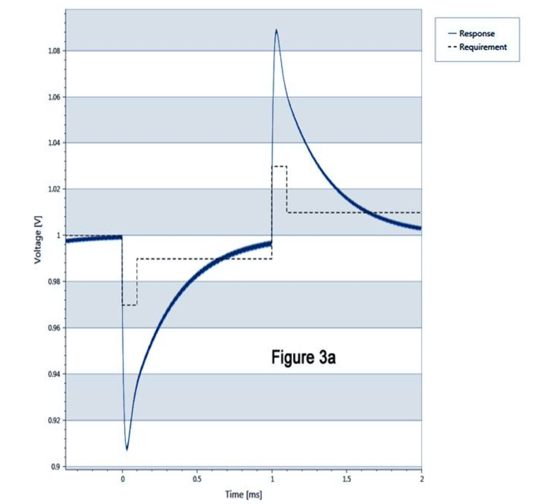
Figura 3b: Respuesta transitoria de carga predeterminada
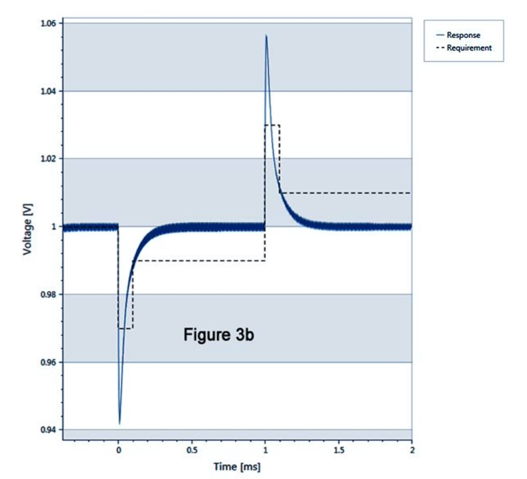
Figura 3c: Respuesta transitoria de carga predeterminada
Para aproximarse a la especificación objetivo de desviación de voltaje, muchos de los módulos de potencia Flex, como los BMR462/463/464/466, incluyen una función de respuesta no lineal (NLR). En este esquema, además del control PID normal, el voltaje de retroalimentación se monitoriza ciclo a ciclo y, si cae fuera de los límites preestablecidos, el sistema de potencia se configura para suministrar o absorber corriente inmediatamente mediante pulsos adicionales o pulsos suprimidos, respectivamente. Esto ayuda a corregir la desviación de salida, aumentando así el ancho de banda del bucle de retroalimentación.
Con un control PID y NLR optimizado, se obtiene una gráfica en tiempo real de la desviación de voltaje con las condiciones definidas. Figura 4, mostrando un tiempo de recuperación muy por debajo del objetivo de 100 µs con una desviación máxima ligeramente superior a nuestro objetivo de +/-30 mV a 65 mV de pico a pico.
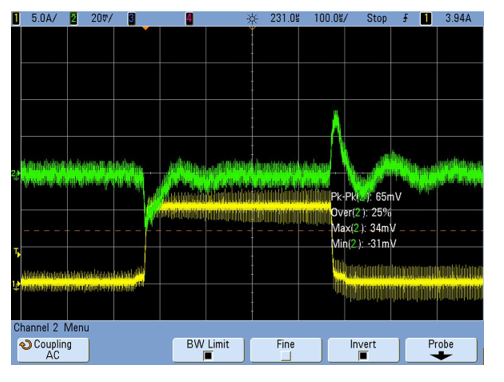
Figura 4: Respuesta medida del sistema de carga y PoL de ejemplo.
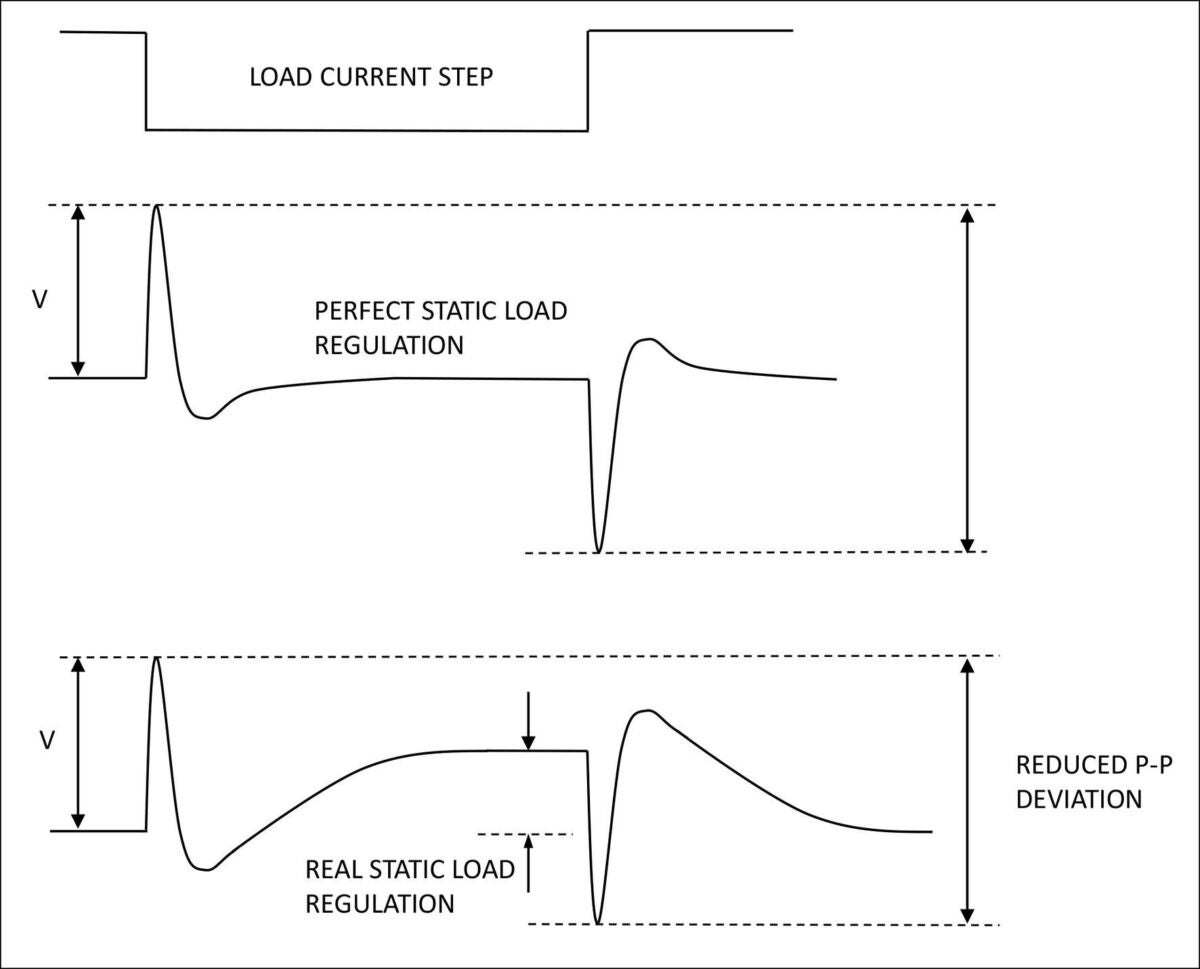
Figura 5: Permitir una regulación de carga estática finita mejora la desviación de voltaje dinámica.
En la Figura 4, la tensión de salida se estabiliza a unos pocos milivoltios del valor nominal después de cada flanco de cambio de carga.
El software Flex Power Designer permite ajustar esta regulación estática para que haya cierta “caída” con el aumento de la carga. Esto puede mejorar la regulación dinámica general, como se muestra en Figura 5, para cumplir potencialmente con la especificación de desviación de voltaje objetivo.
El control digital de los reguladores PoL abre un mundo de posibilidades para optimizar la respuesta transitoria de carga estática y dinámica para adaptarse a las exigentes aplicaciones actuales. Software como Diseñador de energía Flex Gracias a su interfaz gráfica de usuario intuitiva, el proceso de optimización es rápido y sencillo.