Abstracto
Los procesadores, FPGA, DSP y otros dispositivos cuentan con múltiples líneas de alimentación que deben encenderse y apagarse en la secuencia correcta y a la velocidad adecuada para evitar bloqueos, anomalías funcionales o incluso daños. Los convertidores CC-CC de punto de carga controlados digitalmente se utilizan habitualmente para proporcionar a las líneas de alimentación la secuencia y temporización apropiadas mediante firmware o programación a través de un bus de comunicaciones. Este artículo describe los esquemas típicos utilizados.
Artículo
Suministrar energía a circuitos integrados como procesadores, FPGA, DSP, ASIC y memoria RAM DDR no es tarea sencilla. Generalmente se requieren varias líneas de alimentación con diferentes voltajes, desde 3,3 V hasta menos de 1 V. Cada línea debe ser estable ante variaciones de carga y cambios ambientales, tanto de forma estática como dinámica, y ante cambios bruscos en la corriente de carga, desde el modo de reposo al modo activo y viceversa. El voltaje también puede requerir un control activo, mediante técnicas como el escalado adaptativo de voltaje para minimizar el consumo de energía en función de la carga del procesador, o bien, mediante el uso de márgenes para probar los límites de la funcionalidad.
Una consideración adicional es cómo suben y bajan las líneas de voltaje al arrancar y apagar el sistema en términos de secuencia, velocidades de rampa y retardo tras una orden de habilitación/deshabilitación. Si no se configura correctamente, existen varios peligros potenciales. Una limitación simple es la corriente de irrupción; el circuito integrado suele consumir una corriente máxima varias veces superior a su valor normal de funcionamiento a medida que se cargan las capacitancias internas y se estabiliza la lógica. Cada línea también dispone de capacitancia externa, normalmente de varios cientos de microfaradios, para proporcionar energía transitoria durante el funcionamiento normal; sin embargo, estas se descargan al inicio y se suman a la corriente de irrupción. Si todas las líneas suben simultáneamente, la fuente de alimentación común puede sobrecargarse debido a la demanda de corriente de pico y entrar en un modo de limitación de corriente, reduciendo su voltaje. Existe entonces un peligro real de que los voltajes de los reguladores de las líneas individuales disminuyan al intentar arrancar, lo que provoca que la subida no sea monótona e impide el arranque correcto del circuito integrado. La secuenciación de las líneas distribuye la energía de irrupción a lo largo del tiempo, por lo que la demanda máxima en la fuente de alimentación es menor. Con los rieles de alimentación aumentando de forma descontrolada, también existe la posibilidad de problemas momentáneos de contención interna del bus a medida que se estabiliza la polarización del búfer triestado, lo que nuevamente podría impedir la inicialización correcta. Un problema más insidioso puede ocurrir cuando el sustrato o los diodos de protección ESD se polarizan directamente debido a una secuencia incorrecta. Si el riel de 2,5 V en Figura 1, Por ejemplo, si la tensión se activa antes de la línea de 3,3 V, el diodo de protección ESD D1 permitiría el paso de corriente a C1 en la línea de 3,3 V, lo que podría dañarlo. Esta polarización previa en la línea de 3,3 V también podría causar problemas de arranque en el regulador de 3,3 V. Incluso con una secuencia correcta, los fabricantes de circuitos integrados suelen establecer velocidades de rampa máximas y mínimas para suministrar tensiones al arrancar y apagar el circuito, garantizando así un funcionamiento correcto.
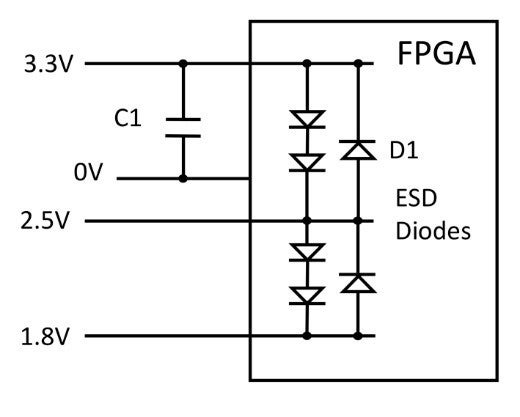
Figura 1: Los diodos ESD proporcionan una ruta de corriente "paralizada" al arrancar.
Los reguladores de punto de carga (PoL) modernos están diseñados específicamente para generar los voltajes de línea necesarios, y los tipos más recientes tendrán control digital, lo que los hace programables tanto en el firmware como de forma remota, normalmente a través de un I2Conexión C PMBus. Además de una monitorización completa, permite configurar el voltaje de salida, así como el retardo de arranque y las velocidades de rampa. Los dispositivos contarán con al menos un pin de habilitación, que permite la secuenciación mediante control externo o temporizado, aunque también podrían incluir modos más avanzados como el control basado en eventos, el control del bus de comunicación general (GCB) y el seguimiento de voltaje.
Secuenciación basada en el tiempo
Quizás el esquema más simple, la secuenciación basada en el tiempo, se basa en retardos de arranque/apagado y velocidades de rampa de subida/bajada preprogramadas en convertidores PoL individuales con una línea de habilitación o control común que inicia la secuencia para todos los convertidores juntos. La precisión de los tiempos depende de las especificaciones de los convertidores individuales, y se debe permitir un margen suficiente para que siempre se mantenga la secuencia correcta. Los fabricantes de convertidores PoL de control digital a menudo proporcionan software de soporte para preconfigurar sus convertidores con los tiempos elegidos, que luego se fijan en el firmware. La GUI del software normalmente mostrará los valores programados gráficamente (Figura 2).
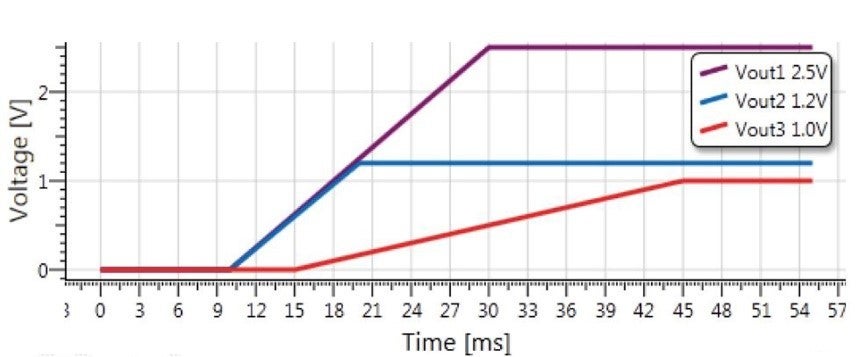
Figura 2: Salida gráfica típica del software de diseño PoL para secuenciación basada en el tiempo (FPD).
Secuenciación basada en eventos
Este esquema garantiza una secuencia estricta de arranque/apagado al vincular la señal de 'alimentación correcta' de un convertidor controlador a la entrada de habilitación del siguiente, que a su vez habilita un convertidor adicional (Figura 3Los tiempos de subida y bajada, así como los retardos de arranque y parada, están preprogramados en cada convertidor, al igual que en el esquema basado en tiempo. La desventaja de este esquema es que la secuencia está cableada de forma fija y requeriría modificaciones de hardware para alterar el orden.
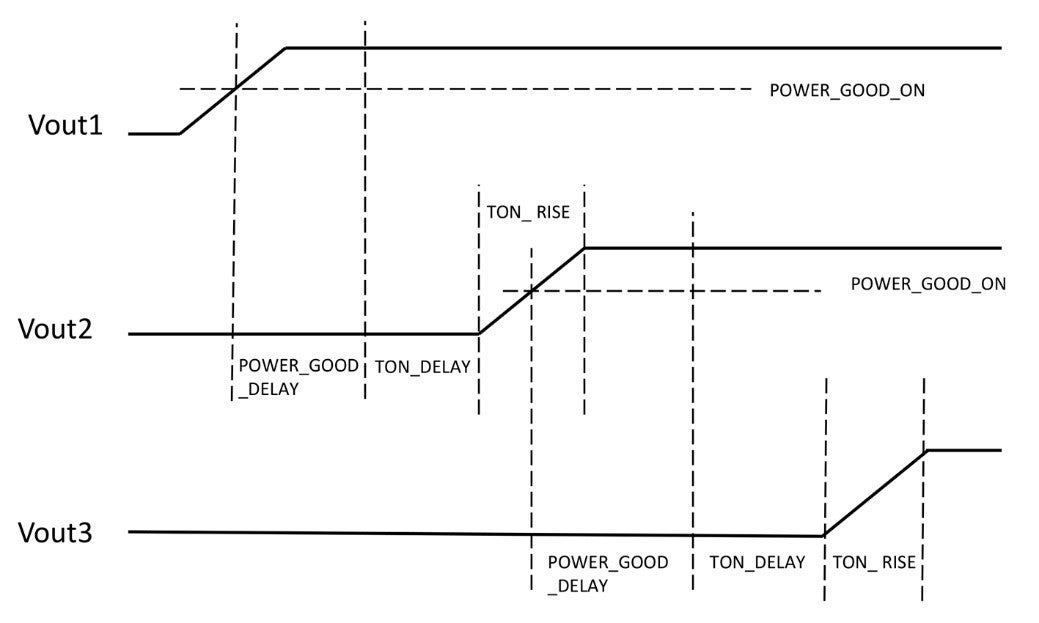
Figura 3: Secuenciación basada en eventos
Secuenciación GCB
Para un alto nivel de flexibilidad, se puede utilizar la secuenciación GCB.. Aquí, cada convertidor PoL puede comunicarse con otros en un grupo a través de un bus de comunicaciones generales serial dedicado para establecer cualquier secuencia y temporización programada, que luego se puede modificar sin cambios de hardware mediante comandos PMBus. Los pines de habilitación de los dispositivos se pueden conectar en paralelo para proporcionar una orden general de inicio/parada a través de una señal CTRL o control PMBus, y se pueden conectar hasta 32 convertidores PoL de esta manera, cubriendo todos los escenarios realistas. Esto permite además funcionalidades simultáneas como propagación de fallas, adición/eliminación de fase, margen de difusión y habilitación de difusión, junto con el monitoreo de temperatura, corriente de carga y cualquier ocurrencia de falla.
Seguimiento de voltaje
A veces, lo importante es el valor relativo de los voltajes de arranque y apagado de los circuitos integrados, con límites a las diferencias entre los rieles en lugar de valores absolutos. Esto se aborda con un modo de seguimiento de voltaje donde el voltaje de salida de un convertidor controlador, típicamente el voltaje más alto, se convierte en la referencia de regulación para otros en un grupo (Figura 4). Ahora, los voltajes del controlador y del objetivo están sincronizados, y el controlador establece los tiempos de subida y bajada. Si el objetivo debe ser una fracción fija de la salida del controlador (lo que se conoce como seguimiento ratiométrico), esto se logra simplemente con un divisor de voltaje resistivo que conecta la salida del controlador con la entrada de control de seguimiento del objetivo. Los convertidores PoL deben diseñarse con una entrada VTRACK para controlar directamente el voltaje de salida.
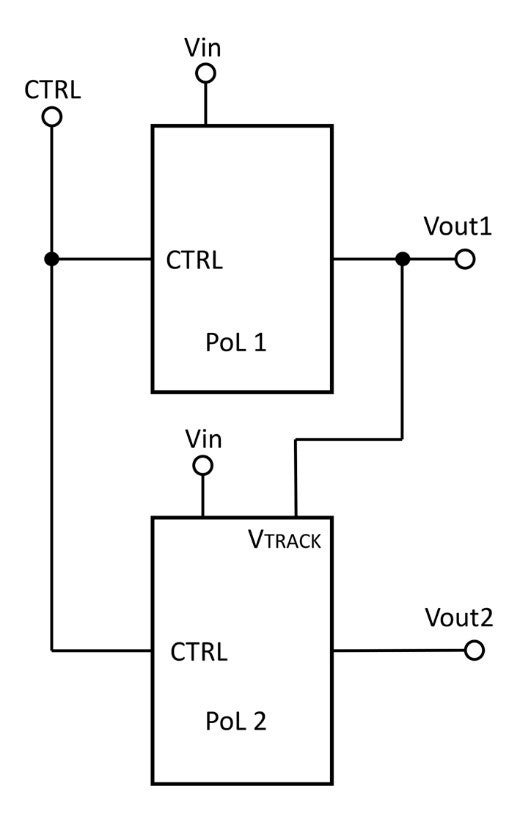
Figura 4: Convertidores PoL en modo de seguimiento
Todos los modos de secuenciación, con control sobre los retardos y las velocidades de rampa de voltaje, se facilitan mediante el moderno PoL digital con su completa flexibilidad y programabilidad. Empresas como Flex Power Modules están a la vanguardia de la tecnología, con una gama de productos PoL junto con su Software de diseño de energía Flex y una interfaz gráfica de usuario intuitiva, que facilita la configuración y la simulación del rendimiento, con comprobación automática de reglas para garantizar que se hayan configurado parámetros válidos.
Nota: los términos comunes "maestro" y "esclavo" en este artículo han sido reemplazados por "controlador" y "objetivo".